Microcontrolador PIC


Los PIC son una familia de microcontroladores tipo RISC fabricados por Microchip Technology Inc. y derivados del PIC1650, originalmente desarrollado por la división de microelectrónica de General Instrument.
El nombre actual no es un acrónimo. En realidad, el nombre completo es PICmicro, aunque generalmente se utiliza como Peripheral Interface Controller (controlador de interfaz periférico).
El PIC original se diseñó para ser usado con la nueva CPU de 16 bits CP16000. Siendo en general una buena CPU, ésta tenía malas prestaciones de entrada y salida, y el PIC de 8 bits se desarrolló en 1975 para mejorar el rendimiento del sistema quitando peso de entrada/salida a la CPU. El PIC utilizaba microcódigo simple almacenado en ROM para realizar estas tareas; y aunque el término no se usaba por aquel entonces, se trata de un diseño RISC que ejecuta una instrucción cada 4 ciclos del oscilador.
En 1985 la división de microelectrónica de General Instrument se separa como compañía independiente que es incorporada como filial (el 14 de diciembre de 1987 cambia el nombre a Microchip Technology y en 1989 es adquirida por un grupo de inversores) y el nuevo propietario canceló casi todos los desarrollos, que para esas fechas la mayoría estaban obsoletos. El PIC, sin embargo, se mejoró con EPROM para conseguir un controlador de canal programable. Hoy en día multitud de PIC vienen con varios periféricos incluidos (módulos de comunicación serie, UART, núcleos de control de motores, etc.) y con memoria de programa desde 512 a 32 000 palabras (una palabra corresponde a una instrucción en lenguaje ensamblador, y puede ser de 12, 14, 16 o 32 bits, dependiendo de la familia específica de PICmicro).
Arquitectura central[editar]
La arquitectura del PIC es sumamente minimalista. Está caracterizada por las siguientes prestaciones:
- Área de código y de datos separadas (Arquitectura Harvard).
- Un reducido número de instrucciones de longitud fija.
- Implementa segmentación de tal modo que la mayoría de instrucciones duran 1 tiempo de instrucción (o 4 tiempos de reloj). Puede haber instrucciones de dos tiempos de instrucción (saltos, llamadas y retornos de subrutinas y otras) o inclusive con más tiempo de instrucción en PIC de gama alta. Esto implica que el rendimiento real de instrucciones por segundo del procesador es de al menos 1/4 de la frecuencia del oscilador.
- Un solo acumulador (W), cuyo uso (como operador de origen) es implícito (no está especificado en la instrucción).
- Todas las posiciones de la RAM funcionan como registros de origen y/o de destino de operaciones matemáticas y otras funciones.1
- Una pila de hardware para almacenar instrucciones de regreso de funciones.
- Una relativamente pequeña cantidad de espacio de datos direccionable (típicamente, 256 bytes), extensible a través de manipulación de bancos de memoria.
- El espacio de datos está relacionado con el CPU, puertos, y los registros de los periféricos.
- El contador de programa está también relacionado dentro del espacio de datos, y es posible escribir en él (permitiendo saltos indirectos).
A diferencia de la mayoría de otros CPU, no hay distinción entre los espacios de memoria y los espacios de registros, ya que la RAM cumple ambas funciones, y esta es normalmente referida como "archivo de registros" o simplemente, registros.
Espacio de datos (RAM)[editar]
Los microcontroladores PIC tienen una serie de registros que funcionan como una RAM de propósito general. Los registros de propósito específico para los recursos de hardware disponibles dentro del propio chip también están direccionados en la RAM. La direccionabilidad de la memoria varía dependiendo de la línea de dispositivos, y todos los dispositivos PIC tienen algún tipo de mecanismo de manipulación de bancos de memoria que pueden ser usados para acceder memoria externa o adicional. Las series más recientes de dispositivos disponen de funciones que pueden cubrir todo el espacio direccionable, independientemente del banco de memoria seleccionado. En los dispositivos anteriores, esto debía lograrse mediante el uso del acumulador.
Para implementar direccionamiento indirecto, se usa un registro de "selección de registro de archivo" (FSR) y uno de "registro indirecto" (INDF): Un número de registro es escrito en el FSR, haciendo que las lecturas o escrituras al INDF serán realmente hacia o desde el registro apuntado por el FSR. Los dispositivos más recientes extienden este concepto con post y preincrementos/decrementos para mayor eficiencia al acceder secuencialmente a la información almacenada. Esto permite que se pueda tratar al FSR como un puntero de pila.
La memoria de datos externa no es directamente direccionable excepto en algunos microcontroladores PIC 18 de gran cantidad de pines.
Tamaño de palabra[editar]
El tamaño de palabra de los microcontroladores PIC es fuente de muchas confusiones. Todos los PIC (excepto los dsPIC) manejan datos en trozos de 8 bits, con lo que se deberían llamar microcontroladores de 8 bits. Pero a diferencia de la mayoría de las CPU, el PIC usa arquitectura Harvard, por lo que el tamaño de las instrucciones puede ser distinto del de la palabra de datos. De hecho, las diferentes familias de PIC usan tamaños de instrucción distintos, lo que hace difícil comparar el tamaño del código del PIC con el de otros microcontroladores. Por ejemplo, un microcontrolador tiene 6144 bytes de memoria de programa: para un PIC de 12 bits esto significa 4096 palabras y para uno de 16 bits, 3072 palabras.
Programación del PIC[editar]
Para transferir el código de un ordenador al PIC normalmente se usa un dispositivo llamado programador. La mayoría de PIC que Microchip distribuye hoy en día incorporan ICSP (In Circuit Serial Programming, programación serie incorporada) o LVP (Low Voltage Programming, programación a bajo voltaje), lo que permite programar el PIC directamente en el circuito destino. Para la ICSP se usan los pines RB6 y RB7 (En algunos modelos pueden usarse otros pines como el GP0 y GP1 o el RA0 y RA1) como reloj y datos y el MCLR para activar el modo programación aplicando un voltaje de 13 voltios. Existen muchos programadores de PIC, desde los más simples que dejan al software los detalles de comunicaciones, a los más complejos, que pueden verificar el dispositivo a diversas tensiones de alimentación e implementan en hardware casi todas las funcionalidades. Muchos de estos programadores complejos incluyen ellos mismos PIC preprogramados como interfaz para enviar las órdenes al PIC que se desea programar. Uno de los programadores más simples es el TE20, que utiliza la línea TX del puerto RS-232 como alimentación y las líneas DTR y CTS para mandar o recibir datos cuando el microcontrolador está en modo programación. El software de programación puede ser el ICprog, muy común entre la gente que utiliza este tipo de microcontroladores. Entornos de programación basados en intérpretes BASIC ponen al alcance de cualquiera proyectos que parecieran ser ambiciosos.
Se pueden obtener directamente de Microchip muchos programadores/depuradores (octubre de 2005):
Programadores[editar]
- PICStart Plus (puerto serie y USB)
- Promate II (puerto serie)
- MPLAB PM3 (puerto serie y USB)
- ICD2 (puerto serie y USB)
- ICD3 (USB)
- PICKit 1 (USB)
- IC-Prog 1.06B
- PICAT 1.25 (puerto USB2.0 para PIC y Atmel)
- WinPic 800 (puerto paralelo, serie y USB)
- PICKit 2 (USB)
- PICKit 3 (USB)
- Terusb1.0
- Eclipse (PIC y AVR. USB)
- MasterProg (USB)
Robotica
-
Robótica

La robótica es la rama de la ingeniería mecánica, de la ingeniería eléctrica, de la ingeniería electrónica, de la ingeniería biomédica, y de las ciencias de la computación, que se ocupa del diseño, construcción, operación, estructura, manufactura, y aplicación de los robots.12
La robótica combina diversas disciplinas como : la mecánica, la electrónica, la informática, la inteligencia artificial, la ingeniería de control y la física.3 Otras áreas importantes en robótica son el álgebra, los autómatas programables, la animatrónica y las máquinas de estados.
El término robot se popularizó con el éxito de la obra R.U.R. (Robots Universales Rossum), escrita por Karel Čapek en 1920. En la traducción al inglés de dicha obra la palabra checa robota, que significa trabajos forzados o trabajador, fue traducida al inglés como robot.4
Leyes De La Robotica
1. Los robots deberán tener un interruptor de emergencia
Lo primero que tenemos que controlar es cualquier situación que se pueda dar de peligro. La evolución que están teniendo estas máquinas hace que la Inteligencia Artificial pueda aprender debido al entrenamiento, por lo que cualquier situación de peligro que se pueda producir debe ser evitada con un interruptor de emergencia.
2. Los robots no podrán hacer daño a los seres humanos
Obviamente, está fundamentada en la principal Ley de Asimov y completa la primera propuesta por la Unión Europea. La robótica siempre tiene que ser pensada para ayudar y proteger a los humanos, por lo que no se permitirá la creación de máquinas cuyos fines sean destruir o dañar a las personas.
3. No podrán generarse relaciones emocionales con los robots
¿Habéis visto “El hombre bicentenario”? En ella, un robot interpretado por Robin Williams permanece colaborando con la misma familia durante décadas, dando como resultado estrechas relaciones personales entre las máquinas y las personas. Si no la habéis visto no seré yo quien os haga spoiler, pero estos vínculos emocionales son la trama central de todo el film. Pues bien, la Unión Europea considera que esto no debe ser así, por lo que prohibirá crear cualquier relación emocional con los robots. El objetivo de esta norma es recordar a los humanos que las inteligencias artificiales no son capaces de sentir amor por nosotros, por lo que nosotros no debemos actuar diferente.

Leyes de los robots.
4. Los que sean más grandes deberán tener un seguro obligatorio
No todas las máquinas serán iguales ni tendrán las mismas características. Tampoco podrán realizar todos las mismas actividades. Es evidente que algunos de ellos tendrán más riesgo de causar ciertos daños materiales que otros robots.
Por ello, la Unión Europea obligará a los dueños de los robots de mayor tamaño, que son considerados los que más riesgo tienen de provocar daños en el entorno, la contratación de un seguro obligatorio como podría suceder con los autos. Así, cualquier desperfecto podrá ser arreglado sin complicaciones.
5. Derechos y obligaciones para los robots
¿Cómo serán llamados ante las administraciones públicas? Parece que “Personas electrónicas” es el nombre escogido para su clasificación legal. Siempre que se utilice la palabra “persona” implica que existirán una serie de derechos que de otra manera ni se pensarían. El debate se encuentra en cuáles serán sus derechos u obligaciones, pero según todo lo que estamos viendo, serán los robots los que asumirán las consecuencias de sus actos junto a sus propietarios o creadores.
6. Tendrán la obligación de pagar impuestos
Principalmente, se utilizarán para reducir el impacto de los robots en el empleo humano. Su entrada en el mercado laboral obligará a muchas empresas a despedir a sus empleados, ya que los robots realizarán el mismo trabajo a un precio menor. Por ello, el Parlamento Europeo considera necesario que las máquinas tributen en la seguridad social, para poder subvencionar las ayudas que se darán a estas personas que han sido despedidas.
tipos de robots
Tipos de Robots
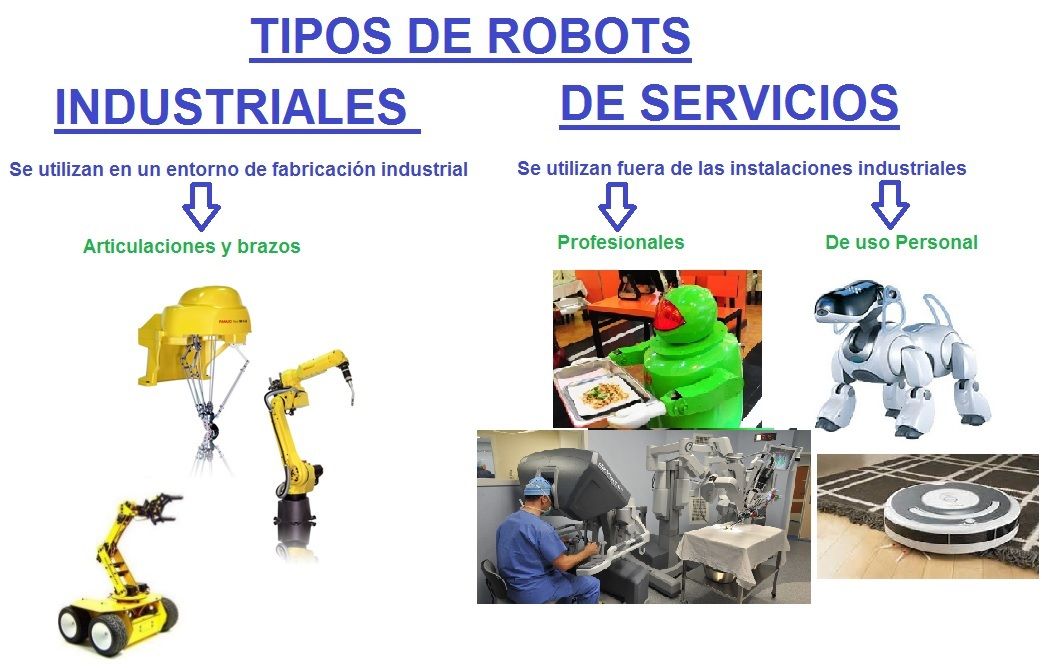
Habitualmente se solían clasificar en dos tipos, de servicio e industriales:
Los robots industriales: Los robots industriales son robots que se utilizan en un entorno de fabricación industrial. Por lo general, éstos suelen ser articulaciones y brazos desarrollados específicamente para aplicaciones tales como la soldadura, manejo de materiales, unión de piezas, pintura y otros. También podríamos incluir algunos vehículos guiados automáticamente.
Los robots industriales: Los robots industriales son robots que se utilizan en un entorno de fabricación industrial. Por lo general, éstos suelen ser articulaciones y brazos desarrollados específicamente para aplicaciones tales como la soldadura, manejo de materiales, unión de piezas, pintura y otros. También podríamos incluir algunos vehículos guiados automáticamente.
Los robots de servicio: Los japoneses están a la vanguardia en este tipo de robots. En esencia, esta categoría se compone de cualquier robot que se utiliza fuera de una instalación industrial, aunque pueden ser subdivididos en dos tipos principales: robots utilizados para trabajos profesionales, y la segunda, robots que se utilizan para uso personal. La creación del humanoide caminando llamado Asimo dio el impulso para varios otros. Hoy en día tenemos robots para el cuidado de ancianos, de uso militar, levantar personas, incluso robots que son capaces de jugar al futbol.
Dada la gran evolución y desarrollo de la robótica es necesario hacer una clasificación más concreta, ya que estos son dos grupos muy amplios donde se podrían incluir otros subgruposmucho más pequeños. Veamos algunos:
Robots domésticos o del hogar: Robots que se utilizan en el hogar. Este tipo de robots incluye muchos dispositivos diferentes, tales como aspiradoras robóticas, limpiadores de piscinas robótica, barrenderos, limpiadores de canalones y otros robots que pueden hacer diferentes tareas. Además, algunos robots de vigilancia y telepresencia podrían ser considerados como robots domésticos si se usan en ese entorno.
Robots médicos: Robots que se utilizan en la medicina y las instituciones médicas. En primer lugar tenemos los robots de cirugía. Además, algunos vehículos guiados automatizados y algunas máquinas para levantar personas también se pueden incluir dentro de este tipo.
Robots militares: Los robots utilizados en aplicaciones militares. Este tipo de robots incluye robots de desactivación de bombas, diferentes tipos de robots de transporte, aviones de reconocimiento. A menudo, los robots creados inicialmente para fines militares pueden ser utilizados en la búsqueda y rescate de personas y otros campos relacionados.
Robots de Entretenimiento: Estos son robots que se utilizan para el entretenimiento. Esta es una categoría muy amplia. Comienza con robots de juguete con simples movimientos y termina con auténticos pesos pesados tales como brazos robóticos articulados usados como simuladores de movimientos.
Robots espaciales: Son los utilizados en el espacio. Este tipo incluiría robots utilizados en la Estación Espacial Internacional, así como vehículos de Marte y otros robots que se utilizan en el espacio.
Robots Educacionales: Son especiales para enseñar robótica utilizado en escuelas de todo el mundo. Seguidores de línea, Lego, sumo-bots y todos aquellos robots que son sólo para el aprendizaje. Incluso hay robots que te enseñan a dibujar.
Robots Humanoides: Robots con aspecto parecido al humano y que realizan tareas propias de un ser humano, incluso expresando emociones.
Otra Clasificación puede ser en función del entorno de trabajo del robot:
Robots Estacionarios: Estos robots son fijos en un lugar y no se pueden mover. Esta categoría incluye robóticos brazos, máquinas-herramientas informáticas, y la mayoría de los robots industriales.
Robots De Suelo: Estos robots están diseñados para operar en la superficie de la tierra o de otro planeta, y por lo general están subclasifican por su forma de transmisión del movimiento: ruedas, pistas o piernas.
Robots Submarinos: También conocidos como vehículos submarinos autónomos, estos están diseñados para operar bajo el agua, y muchos de ellos a gran profundidad.
Robots Aéreos: Son vehículos aéreos no tripulados e incluyen diversos tipos de máquinas voladoras robóticas, incluyendo aviones y helicópteros.
Robots de microgravedad: Los robots que han sido diseñados para funcionar en entornos de baja gravedad, como la órbita terrestre.

Por último hay otros llamados de trabajo en entornos peligrosos, que como su propio nombre indica se desarrollan para trabajar en sitio peligrosos, como un robot para desactivar bombas o también llamado robot de artificieros, o los robots de guerra.
También se pueden clasificar en función de su autonomía:
Teleoperados: Robots controlados a distancia y que necesitan ser controlados todo el tiempo por un ser humano. Su control puede ser con cable o sin el. Un ejemplo serían los drones o los robots para hacer operaciones.
Semi-automáticos: Tiene cierto grado de autonomía, pero siguen siendo controlados por un ser humano. Un robot clasificador de paquetes podría ser semiautomático o incluso una barrera para abrirse cuando se le introduce una tarjeta (parking de coches).
Automáticos: Estos robots pueden tomar sus propias decisiones sin la necesidad de un ser humano. El más conocido últimamente podría ser el coche sin conductor.
Por último otra clasificación podría ser incluso en función de su tamaño: Robots, Microrobots (tamaño de micras) y NanoRobots o NanoBots (tamaño manométrico, el más
Según su cronología[editar]
La que a continuación se presenta es la clasificación más común:
- 1.ª Generación.
Robots manipuladores. Son sistemas mecánicos multifuncionales con un sencillo sistema de control, bien manual, de secuencia fija o de secuencia variable.
- 2.ª Generación.
Robots de aprendizaje. Repiten una secuencia de movimientos que ha sido ejecutada previamente por un operador humano. El modo de hacerlo es a través de un dispositivo mecánico. El operador realiza los movimientos requeridos mientras el robot le sigue y los memoriza.
- 3.ª Generación.
Robots con control sensorizado. El controlador es un ordenador que ejecuta las órdenes de un programa y las envía al manipulador o robot para que realice los movimientos necesarios.
Según su estructura[editar]
La estructura es definida por el tipo de configuración general del robot, puede ser metamórfica. El concepto de metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un robot a través del cambio de su configuración por el propio robot. El metamorfismo admite diversos niveles, desde los más elementales (cambio de herramienta o de efecto terminal), hasta los más complejos como el cambio o alteración de algunos de sus elementos o subsistemas estructurales. Los dispositivos y mecanismos que pueden agruparse bajo la denominación genérica del robot, tal como se ha indicado, son muy diversos y es por tanto difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y riguroso. La subdivisión de los robots, con base en su arquitectura, se hace en los siguientes grupos: poliarticulados, móviles, androides, zoomórficos e híbridos.
- 1. Poliarticulados
En este grupo se encuentran los robots de muy diversa forma y configuración, cuya característica común es la de ser básicamente sedentarios (aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados) y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas, y con un número limitado de grados de libertad. En este grupo se encuentran los robots manipuladores, los robots industriales y los robots cartesianos, que se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o reducir el espacio ocupado en el suelo.


- 2. Móviles


Son Robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores. Estos robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoeléctricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
- 3. Androides
.jpg)
{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}
Son los tipos de robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser humano. Actualmente, los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación. Uno de los aspectos más complejos de estos robots, y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simultáneamente el equilibrio del Robot. Vulgarmente se los suele llamar "marionetas" cuando se les ven los cables que permiten ver cómo realiza sus procesos.
- 4. Zoomórficos

Los robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los Robots zoomórficos en dos categorías principales: caminadores y no caminadores. El grupo de los robots zoomórficos no caminadores está muy poco evolucionado. Los experimentos efectuados en Japón basados en segmentos cilíndricos biselados acoplados axialmente entre sí y dotados de un movimiento relativo de rotación. Los Robots zoomórficos caminadores multípedos son muy numerosos y están siendo objeto de experimentos en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos terrenos, pilotados o autónomos, capaces de evolucionar en superficies muy accidentadas. Las aplicaciones de estos robots serán interesantes en el campo de la exploración espacial y en el estudio de los volcanes.

- 5. Híbridos

Estos robots corresponden a aquellos de difícil clasificación, cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas es, al mismo tiempo, uno de los atributos de los robots móviles y de los robots zoomórficos.
Funcionamiento De Fabrica Robotizada
Comentarios
Publicar un comentario